The testing program for this season has come to completion with the 6 Pole rotor outfitted with one set of six 2"x0.75"x0.375" Neo's stacked with 1.5"x0.75"x0.188" Neo's using the Loctite AA 326 magnet adhesive. The Neo's were first stacked and cured, then mounted very carefully on the rotor taking into account the nearly 80# pull force. Fortunately the Al rotor is non magnetic, however the adjoining magnets make this a somewhat tricky operation.
The rotor was installed in the 3 coil ZFM assembly with the coil to Neo gap adjusted to 1/16" - tight. The ZFM was then tuned to the appropriate dwell and advance, then cranked up and tested both in serial and parallel mode. The longer length and greater magnetic pull force along with the tighter gap over the previous configuration did reduce the RPM, but improved the overall efficiency. The most reasonable configuration that yielded both output power and efficiency was in the 30 volt parallel mode. The virtual coil poles for this Neo arrangement were very similar to the prior posts coming in about 55 degrees - not ideal but close to. So lets take a look at the run data:
| RPM | Load(gr) | Output(w) | Volts | Amps | Input(w) | Eff% |
| 4026 | 0 | 0.00 | 30.28 | 0.60 | 18.17 | 0.00 |
| 3406 | 1020 | 22.61 | 30.66 | 1.39 | 42.62 | 53.06 |
| 3010 | 1630 | 31.94 | 30.64 | 2.03 | 62.20 | 51.34 |
| 2917 | 1825 | 34.65 | 30.72 | 2.16 | 66.36 | 52.22 |
| 2942 | 1760 | 33.70 | 30.66 | 2.14 | 65.61 | 51.37 |
| 3402 | 960 | 21.26 | 30.31 | 1.40 | 42.43 | 50.10 |
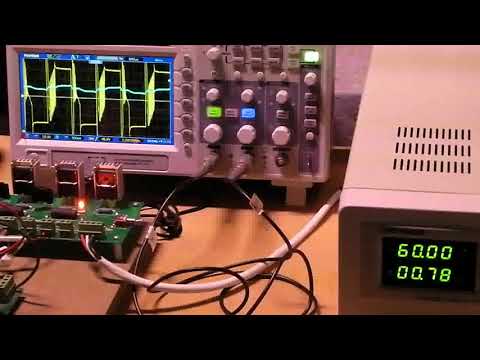
A quick expanded look at the oscope shot at high load below
One will note how quickly the amperage (blue trace) returns to a zero value when the power is cycled off and the how rapidly the voltage rises on power-up - a definite characteristic of the air coil. So at this stage of experimentation all the goals were achieved, with the exception of the virtual coil arc. This particular ZFM configuration should be able to achieve 60% efficiency or more with the proper build techniques and tuning.
For the next phase of evolution there are experiments planned to work with the coil wiring using a multifilar approach. A recently conducted experiment using the current assembly yielded preliminary results demonstrating that this can be a very worthwhile direction. More to come this late summer barring any disruptions in the material supply chain. One can only hope!
Thank you for your attention, stay healthy and enjoy the summer,
Yaro

Attached Files


Leave a comment: