 Tweet
Tweet
6 Pole ZFM with Coils in Parallel
Completing the test program of the 6 Pole ZFM was a series of experiments with the bifilar coils wired in a parallel configuration versus the prior Post's series configuration. The overall three coil parallel resistance was 1.5 ohms compared to 6.0 ohms for the prior series arrangement. The parallel configuration was tested with and without the BEMF recovery circuit and with the 60v Power supply and 24v LABs for comparison. Only the 24v data will be presented at this time.
The coils in parallel create a different mode of ZFM operation. The amperage draw is nearly double the series mode value for a given run voltage, while the RPM is also nearly twice the series value. The impression is that the motor is running at a much higher voltage. All in all, this mode creates a very tractable motor for certain applications with power efficiencies very close to or at 50%. The 4 Pole ZFM will display similar characteristics when properly configured in parallel mode.
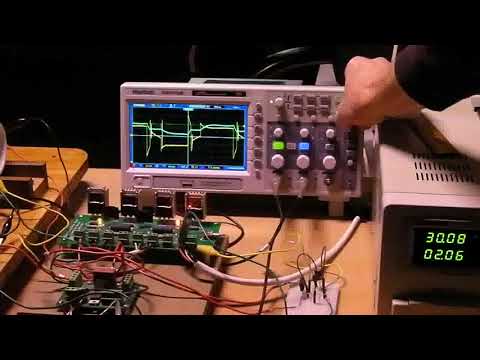
Below is a sample of the data points for both options. The ZFM has slightly different characteristics between the two types of applied power - the LAB runs required a timing adjustment to compensate. The attached pics were all generated under no Load. Pic 2 demonstrates the oscope wave form for the LAB without the BEMF circuit, while Pic 3 with the BEMF circuit engaged. The Power supply mode with the BEMF circuit engaged is nearly identical to Pic 3 and not included.
Parallel Mode with Power Supply no BEMF Circuit (Pic 1)
4360 RPM 24.01v 0.60A 0gr Load
3234 RPM 24.40v 1.46A 800gr Load 47.3% Eff
2662 RPM 24.29v 2.12A 1350gr Load 44.5% Eff
Parallel Mode with LAB and BEMF Circuit (Pic 2 and 3))
4640 RPM 24.88v 0.65A 0gr Load
3616 RPM 24.71v 1.52A 800gr Load 50.1% Eff
2825 RPM 24.64v 2.22A 1400gr Load 47.1% Eff
Pretty much done with this particular 6 Pole rotor after achieving all the initial design goals and ready to move on to the next phase.
Pic1


Pic 2

Pic 3

Completing the test program of the 6 Pole ZFM was a series of experiments with the bifilar coils wired in a parallel configuration versus the prior Post's series configuration. The overall three coil parallel resistance was 1.5 ohms compared to 6.0 ohms for the prior series arrangement. The parallel configuration was tested with and without the BEMF recovery circuit and with the 60v Power supply and 24v LABs for comparison. Only the 24v data will be presented at this time.
The coils in parallel create a different mode of ZFM operation. The amperage draw is nearly double the series mode value for a given run voltage, while the RPM is also nearly twice the series value. The impression is that the motor is running at a much higher voltage. All in all, this mode creates a very tractable motor for certain applications with power efficiencies very close to or at 50%. The 4 Pole ZFM will display similar characteristics when properly configured in parallel mode.
Below is a sample of the data points for both options. The ZFM has slightly different characteristics between the two types of applied power - the LAB runs required a timing adjustment to compensate. The attached pics were all generated under no Load. Pic 2 demonstrates the oscope wave form for the LAB without the BEMF circuit, while Pic 3 with the BEMF circuit engaged. The Power supply mode with the BEMF circuit engaged is nearly identical to Pic 3 and not included.
Parallel Mode with Power Supply no BEMF Circuit (Pic 1)
4360 RPM 24.01v 0.60A 0gr Load
3234 RPM 24.40v 1.46A 800gr Load 47.3% Eff
2662 RPM 24.29v 2.12A 1350gr Load 44.5% Eff
Parallel Mode with LAB and BEMF Circuit (Pic 2 and 3))
4640 RPM 24.88v 0.65A 0gr Load
3616 RPM 24.71v 1.52A 800gr Load 50.1% Eff
2825 RPM 24.64v 2.22A 1400gr Load 47.1% Eff
Pretty much done with this particular 6 Pole rotor after achieving all the initial design goals and ready to move on to the next phase.
Pic1
Pic 2
Pic 3




Comment